In CBRS networks, the ability to accurately render propagated energy on maps is essential. Operators and enterprises need intuitive visualizations that reveal true coverage strengths and gaps, so they can confidently plan deployments, optimize configurations, and deliver reliable service.
Traditional CBRS planning relies on the Irregular Terrain Model (ITM), the terrestrial model mandated by Spectrum Access Systems (SAS) for regulatory compliance and incumbent protection. ITM provides fast, stable wide-area predictions using only a simple 1D profile of ground elevation along the propagation path. These predictions remain consistent across seasons and weather, making ITM highly practical for broad geographic coverage.
Yet ITM has inherent limitations. Because it works from a one-dimensional terrain slice, it cannot fully account for horizontal geometry such as building edges, vegetation clusters, or urban clutter. This often results in smoothed or incomplete pictures of local signal behavior, especially in dense environments.
To deliver more realistic service area maps, we use a hybrid multi-scale approach. It applies the right propagation method at the right distance: physics-based ray tracing for detailed near-field modeling and the proven terrestrial ITM for reliable wide-area context.
Physics-based ray tracing excels because it models the full three-dimensional environment. It captures reflections, diffractions, scattering, and multipath effects created by actual buildings, trees, and clutter, details impossible to represent with ITM’s 1D elevation profile.
However, ray tracing depends on a high-fidelity digital twin of the real world: a detailed 3D scene including terrain, structures, and vegetation. Constructing and processing such scenes at scale becomes computationally demanding, which practically limits effective ray-tracing coverage to the near-field, typically out to about the first couple of kilometers.
By contrast, ITM requires minimal input data, just the 1D terrain profile along each path. This simplicity allows it to generate dependable predictions over much larger distances, tens to 100 km, with comparable computational effort.
Our hybrid method leverages this natural complementarity. We combine near-field precision from physics-based ray tracing (powered by NVIDIA’s Sionna¹) with wide-area stability from ITM. The result is coverage heatmaps that are both locally accurate and geographically scalable, while staying fully compatible with SAS requirements, where ITM serves as the regulatory baseline.
¹ We’ll explore Sionna and its GPU-accelerated ray-tracing capabilities in more detail in a future post.
Different CBRS deployments have different visualization priorities:
The hybrid model addresses both needs without compromise. It gives enterprise users the detailed local insights required for demanding applications, while providing fixed wireless operators with the broad, dependable view essential for large-scale planning.
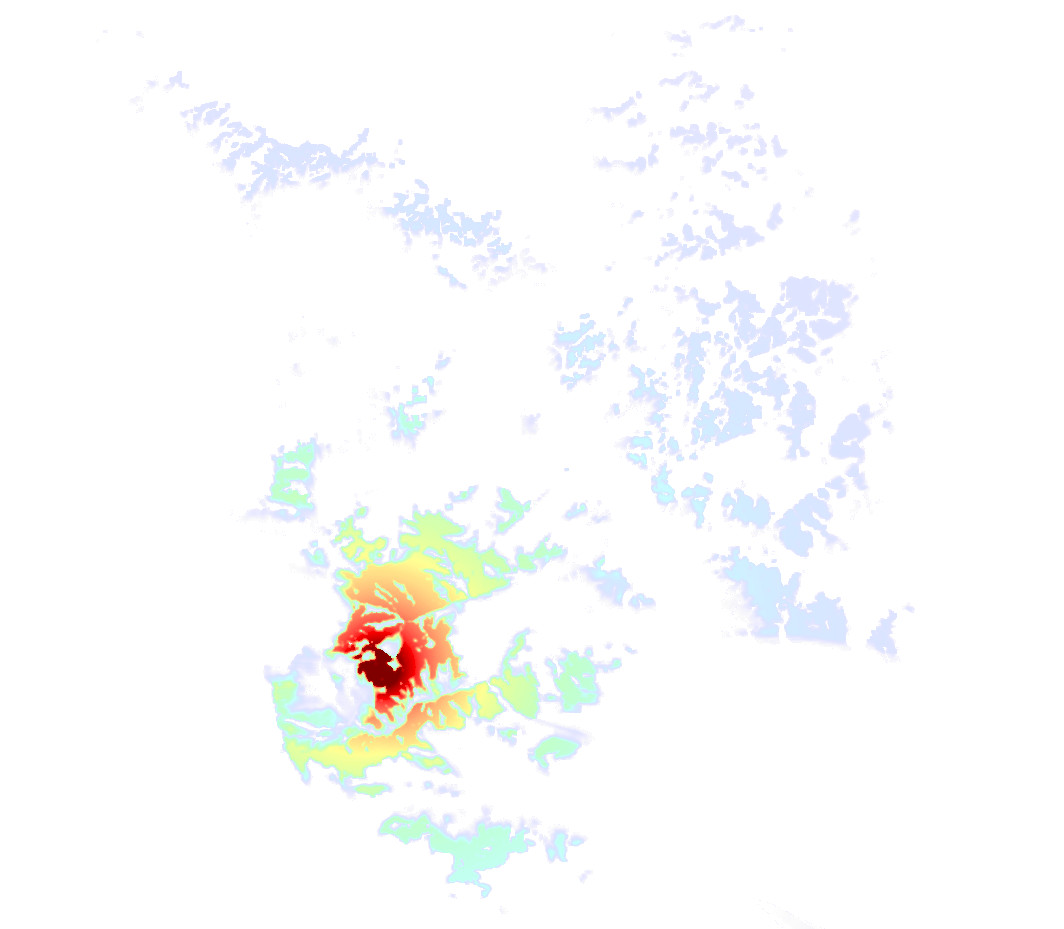
When rendered on maps, the hybrid approach produces noticeably clearer service area visualizations. Near-field ray tracing adds crisp detail including sharper building shadows, more realistic signal behavior in cluttered areas, and better-defined coverage boundaries exactly where local effects dominate. The ITM wide-area layer supplies reliable context across broader regions.
(See the accompanying example rendered visual, which illustrates how the combined modeling highlights coverage strengths and gaps more effectively than ITM alone.)
These maps enable engineers and operators to quickly identify serviceable areas, spot weaknesses, adjust parameters, and make faster, better-informed deployment decisions.
This multi-scale modeling delivers tangible advantages:
By matching the propagation method to the scale where it performs best, we move beyond one-size-fits-all modeling toward practical, context-aware tools that help you truly see and understand your CBRS network performance.
This hybrid approach represents a practical advancement in propagation modeling for shared-spectrum bands like CBRS. Future posts will share real-world validation against drive tests, deployment experiences, and additional enhancements.
Pages